Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date: Friday, December 11th
Time: 11:00am - 12:00pm
Venue: Zoom Room 8
Note: All live sessions will be screened on Singapore Time/GMT+8. Convert your time zone here.
Abstract: We present ElaStick, a variable stiffness VR controller that allows experiencing the illusion of wielding objects of various flexibility. In our demo session, participants can experience firsthand (1) the stiffness of swords with different length and shape, and (2) changing flexibility due to interaction in VR.
Author(s)/Presenter(s):
Neung Ryu, Korea Advanced Institute of Science and Technology (KAIST), South Korea
Myung Jin Kim, Korea Advanced Institute of Science and Technology (KAIST), South Korea
Andrea Bianchi, Korea Advanced Institute of Science and Technology (KAIST), South Korea

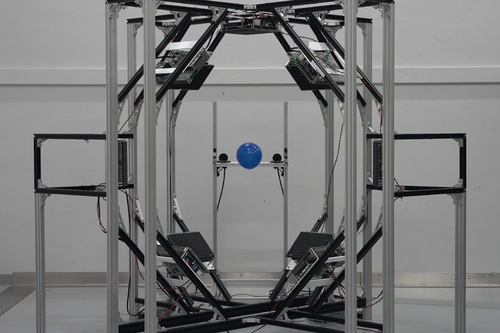
Abstract: In this paper, we propose a balloon interface, a mid-air physical prop that affords direct single-handed manipulation in a safe manner. The system uses a spherical helium-filled balloon controlled by ultrasound phased array transducers as a physical prop that is safe to collide at high speed.
Author(s)/Presenter(s):
Takuro Furumoto, University of Tokyo, Japan
Masahiro Fujiwara, University of Tokyo, Japan
Yasutoshi Makino, University of Tokyo, Japan
Hiroyuki Shinoda, University of Tokyo, Japan
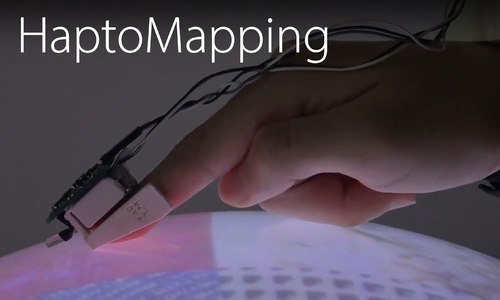
Abstract: We propose “HaptoMapping,” a novel projection-based AR system, that can present consistent visuo-haptic sensations on a non-planar physical surface without installing any visual displays to users and by keeping the quality of visual information. we introduce three application scenarios in daily scenes.
Author(s)/Presenter(s):
Yamato Miyatake, Osaka University, Japan
Takefumi Hiraki, Osaka University, Japan
Tomosuke Maeda, Independent, Japan
Daisuke Iwai, Osaka University, JST PRESTO, Japan
Kosuke Sato, Osaka University, Japan
Abstract: HexTouch is a forearm-mounted robot that performs complementary touches in relation to the behaviors of a companion agent in VR. The robot consists of a series of tactors driven by servo motors that render specific tactile patterns to communicate emotions (fear, happiness, disgust, anger, and sympathy) and other notification cues.
Author(s)/Presenter(s):
Ran Zhou, Parsons School of Design, United States of America
Yanzhe Wu, Parsons School of Design, United States of America
Harpreet Sareen, Parsons School of Design, United States of America

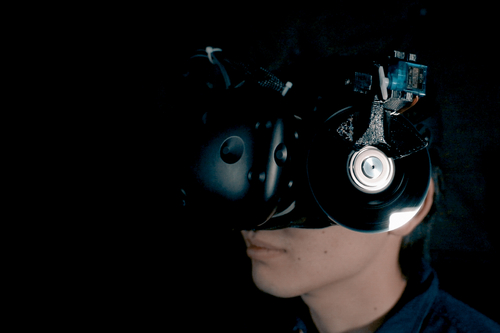
Abstract: we propose KABUTO, a haptic display add-on for HMDs designed to induce whole-body interaction by the application of kinesthetic feedback. KABUTO can provide impact and resistance using flywheels and brake in response to various head movements as extensive head movements lead to dynamic movements throughout the whole body.
Author(s)/Presenter(s):
Taku Tanichi, Keio University Graduate School of Media Design, Japan
Futa Asada, Keio University Graduate School of Media Design, Japan
Kento Matsuda, Keio University Graduate School of Media Design, Japan
Danny Hynds, Keio University Graduate School of Media Design, Japan
Kouta Minamizawa, Keio University Graduate School of Media Design, Japan