Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date: Sunday, December 13th
Time: 9:30am - 10:00am
Venue: Zoom Room 5
Note: All live sessions will be screened on Singapore Time/GMT+8. Convert your time zone here.
Abstract: We present RoboGrammar, a fully automated approach for generating optimized robot structures to traverse given terrains. In this framework, we represent each robot design as a graph, and use a graph grammar to express possible arrangements of physical robot assemblies. Each robot design can then be expressed as a sequence of grammar rules. Using only a small set of rules our grammar can describe hundreds of thousands of possible robot designs. The construction of the grammar limits the design space to designs that can be fabricated. For a given input terrain, the design space is searched to find the top performing robots and their corresponding controllers. We introduce Graph Heuristic Search -- a novel method for efficient search of combinatorial design spaces. In Graph Heuristic Search, we explore the design space while simultaneously learning a function that maps incomplete designs (e.g., nodes in the combinatorial search tree) to the best performance values that can be achieved by expanding these incomplete designs. Graph Heuristic Search prioritizes exploration of the most promising branches of the design space. To test our method we optimize robots for a number of challenging and varied terrains. We demonstrate that RoboGrammar can successfully generate nontrivial robots that are optimized for a single terrain or a combination of terrains.
Author(s)/Presenter(s):
Allan Zhao, Massachusetts Institute of Technology, United States of America
Jie Xu, Massachusetts Institute of Technology, United States of America
Mina Konaković-Luković, Massachusetts Institute of Technology, United States of America
Josephine Hughes, Massachusetts Institute of Technology, United States of America
Andrew Spielberg, Massachusetts Institute of Technology, United States of America
Daniela Rus, Massachusetts Institute of Technology, United States of America
Wojciech Matusik, Massachusetts Institute of Technology, United States of America

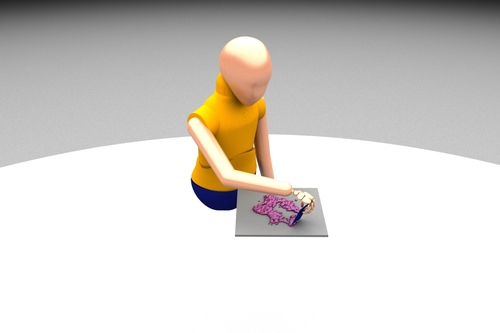
Abstract: We present a method of training character manipulation of amorphous materials such as those often used in cooking. Common examples of amorphous materials include granular materials (salt, uncooked rice), fluids (honey), and visco-plastic materials (sticky rice, softened butter). A typical task is to spread a given material out across a flat surface using a tool such as a scraper or knife. We use reinforcement learning to train our controllers to manipulate materials in various ways. The training is performed in a physics simulator that uses position-based dynamics of particles to simulate the materials to be manipulated. The neural network control policy is given observations of the material (e.g. a low-resolution density map), and the policy outputs actions such as rotating and translating the knife. We demonstrate policies that have been successfully trained to carry out the following tasks: spreading, gathering, and flipping. We produce a final animation by using inverse kinematics to guide a character’s arm and hand to match the motion of the manipulation tool such as a knife or a frying pan.
Author(s)/Presenter(s):
Yunbo Zhang, Georgia Institute of Technology, United States of America
Wenhao Yu, Georgia Institute of Technology, United States of America
C. Karen Liu, Stanford University, United States of America
Charles C. Kemp, Georgia Institute of Technology, United States of America
Greg Turk, Georgia Institute of Technology, United States of America
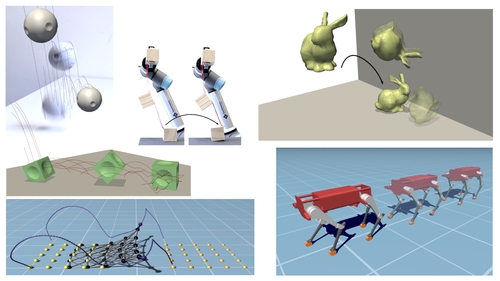
Abstract: We present a differentiable dynamics solver that is able to handle frictional contact for rigid and deformable objects within a unified framework. Through a principled mollification of normal and tangential contact forces, our method circumvents the main difficulties inherent to the non-smooth nature of frictional contact. We combine this new contact model with fully-implicit time integration to obtain a robust and efficient dynamics solver that is analytically differentiable. In conjunction with adjoint sensitivity analysis, our formulation enables gradient-based optimization with adaptive trade-offs between simulation accuracy and smoothness of objective function landscapes. We thoroughly analyse our approach on a set of simulation examples involving rigid bodies, visco-elastic materials, and coupled multi-body systems. We furthermore showcase applications of our differentiable simulator to parameter estimation for deformable objects, motion planning for robotic manipulation, trajectory optimization for compliant walking robots, as well as efficient self-supervised learning of control policies.
Author(s)/Presenter(s):
Moritz Geilinger, ETH Zürich, Switzerland
David Hahn, ETH Zürich, Switzerland
Jonas Zehnder, Université de Montréal, Canada
Moritz Bächer, Disney Research, Switzerland
Bernhard Thomaszewski, ETH Zürich, Université de Montréal, Switzerland
Stelian Coros, ETH Zürich, Switzerland
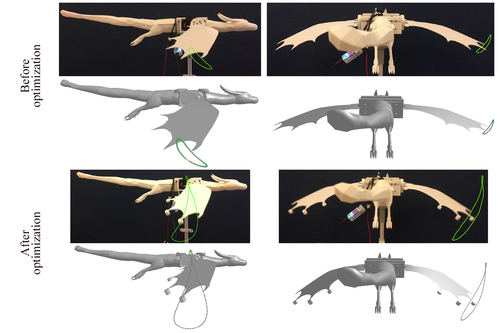
Abstract: We present a computational method for designing compliant mechanical systems that exhibit large-amplitude oscillations. The technical core of our approach is an optimization-driven design tool that combines sensitivity analysis for optimization with the Harmonic Balance Method for simulation. By establishing dynamic force equilibrium in the frequency domain, our formulation avoids the major limitations of existing alternatives: it handles nonlinear forces, side-steps any transient process, and automatically produces periodic solutions. We introduce design objectives for amplitude optimization and trajectory matching that enable intuitive high-level authoring of large-amplitude motions. Our method can be applied to many types of mechanical systems, which we demonstrate through a set of examples involving compliant mechanisms, flexible rod networks, elastic thin shell models, and multi-material solids. We further validate our approach by manufacturing and evaluating several physical prototypes.
Author(s)/Presenter(s):
Pengbin Tang, Université de Montréal, Canada
Jonas Zehnder, Université de Montréal, Canada
Stelian Coros, ETH Zürich, Switzerland
Bernhard Thomaszewski, Université de Montréal, ETH Zürich, Canada
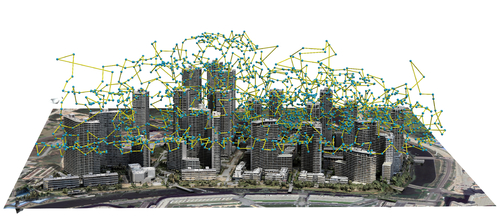
Abstract: With rapid development in UAV technologies, it is now possible to reconstruct large-scale outdoor scenes using only images captured by low-cost drones. The problem, however, becomes how to plan the aerial path for a drone to capture images so that two conflicting goals are optimized: maximizing the reconstruction quality and minimizing mid-air image acquisition effort. Existing approaches either resort to pre-defined dense and thus inefficient view sampling strategy, or plan the path adaptively but require two onsite flight passes and intensive computation in-between. Hence, using these methods to capture and reconstruct large-scale scenes can be tedious. In this paper, we present an adaptive aerial path planning algorithm that can be done before the site visit. Using only a 2D map and a satellite image of the to-be-reconstructed area, we first compute a coarse 2.5D model for the scene based on the relationship between buildings and their shadows. A novel Max-Min optimization is then proposed to select a minimal set of viewpoints that maximizes the reconstructability under the the same number of viewpoints. Experimental results on benchmark show that our planning approach can effectively reduces the number of viewpoints needed than the previous state-of-the-art method, while maintaining the comparable reconstruction quality. Since no field computation or a second visit is needed, and the view number is also minimized, our approach significantly saves the time required in the field as well as the off-line computation cost for multi-view stereo reconstruction, making it very possible to reconstruct a large-scale urban scene in a short time with bearable effort.
Author(s)/Presenter(s):
Xiaohui Zhou, Shenzhen University, China
Ke Xie, Shenzhen University, China
Kai Huang, Shenzhen University, China
Yilin Liu, Shenzhen University, China
Yang Zhou, Shenzhen University, China
Minglun Gong, University of Guelph, Canada
Hui Huang, Shenzhen University, China