Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date: Thursday, December 10th
Time: 12:30pm - 1:00pm
Venue: Zoom Room 3
Note: All live sessions will be screened on Singapore Time/GMT+8. Convert your time zone here.
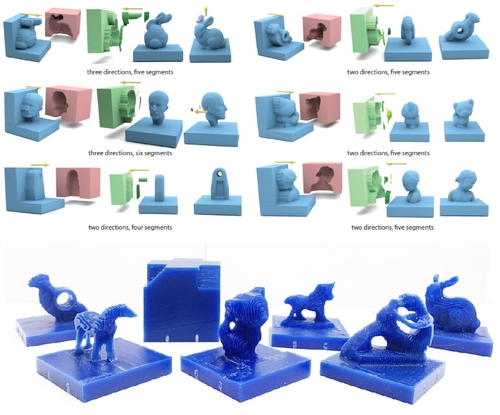
Abstract: We introduce carvable volume decomposition for efficient 3-axis CNC machining of 3D freeform objects, where our goal is to develop a fully automatic method to jointly optimize setup and path planning. We formulate our joint optimization as a volume decomposition problem which prioritizes minimizing the number of setup directions while striving for a minimum number of continuously carvable volumes, where a 3D volume is continuously carvable, or simply carvable, if it can be carved with the machine cutter traversing a single continuous path. Geometrically, carvability combines visibility and monotonicity and presents a new shape property which had not been studied before. Given a target 3D shape and the initial material block, our algorithm first finds the minimum number of carving directions by solving a set cover problem. Specifically, we analyze cutter accessibility and select the carving directions based on an assessment of how likely they would lead to a small carvable volume decomposition. Next, to obtain a minimum decomposition based on the selected carving directions efficiently, we narrow down the solution search by focusing on a special kind of points in the residual volume, single access or SA points, which are points that can be accessed from one and only one of the selected carving directions. Candidate carvable volumes are grown starting from the SA points. Finally, we devise an energy term to evaluate the carvable volumes and their combinations, leading to the final decomposition. We demonstrate the performance of our decomposition algorithm on a variety of 2D and 3D examples and evaluate it against the ground truth, where possible, and solutions provided by human experts. Physically machined models are produced where each carvable volume is continuously carved following a connected Fermat spiral toolpath.
Author(s)/Presenter(s):
Ali Mahdavi Amiri, Simon Fraser University, Canada
Fenggen Yu, Simon Fraser University, Canada
Haisen Zhao, University of Washington, Shandong University, United States of America
Adriana Schulz, University of Washington, United States of America
Hao (Richard) Zhang, Simon Fraser University, Canada
Abstract: The anisotropy of mechanical strength on a 3D printed model can be controlled in a multi-axis 3D printing system as materials can be accumulated along dynamically varied directions. In this paper, we present a new computational framework to generate specially designed layers and toolpaths of multi-axis 3D printing for strengthening a model by aligning filaments along the directions with large stresses. The major challenge comes from how to effectively decompose a solid into a sequence of strength-aware and collision-free working surfaces. We formulate it as a problem to compute an optimized governing field together with a selected orientation of fabrication setup. Iso-surfaces of the governing field are extracted as working surface layers for filament alignment. Supporting structures in curved layers are constructed by extrapolating the governing field to enable the fabrication of overhangs. Compared with planar-layer based Fused Deposition Modeling (FDM) technology, models fabricated by our method can withstand up to 6.35x loads in experimental tests.
Author(s)/Presenter(s):
Guoxin Fang, Delft University of Technology, Netherlands
Tianyu Zhang, The Chinese University of Hong Kong, Hong Kong
Sikai Zhong, Wayne State University, United States of America
Xiangjia Chen, The Chinese University of Hong Kong, Hong Kong
Zichun Zhong, Wayne State University, United States of America
Charlie C. L. Wang, University of Manchester, United Kingdom

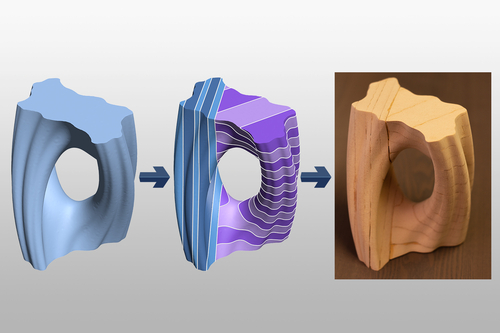
Abstract: Milling objects from precut slabs of materials such as wood or stone using a 3-axis mill is an appealing, cheap, and precise fabrication technique. However, a 3-axis mill can only carve a height-field (HF) surface during each milling pass, limiting the space of directly millable shapes. Moreover, the size of millable shapes is bounded by the slab dimensions. For most pre-cut materials, one of these dimensions, the height, is typically significantly smaller than the others. Extending 3-axis milling of pre-cut slabs to general arbitrarily-sized shapes requires decomposing them into bounded-height 3-axis-millable and assemblable parts, or slices, which can be individually milled and then assembled to form the target object. We present DHFSlicer, a novel decomposition method that satisfies the above constraints and significantly reduces both milling time and material waste compared to alternative approaches. We satisfy the fabrication constraints by partitioning shapes into bounded-height double-height-field (DHF) slices, which can be fabricated using two milling passes: the HF surface accessible from one side is milled first, the slice is then flipped using appropriate fixtures, and then the second, remaining, HF surface is milled. DHFSlicer uses an efficient coarse-to-fine process to produce DHF slices that satisfy all fabrication constraints. It first partitions the inputs into maximally coarse blocks that satisfy a local DHF criterion with respect to per-block milling axes, and then cuts each block into well-sized DHF slices. It minimizes milling time and material waste by keeping the slice count small, and maximizing slice height. We enable an end-to-end DHF slice-based fabrication pipeline by automatically computing suitable fabrication fixtures and validate it by fabricating objects from slabs of foam, wood, and MDF. We demonstrate that using our slices reduces milling time and material waste by 42% on average compared to existing automatic alternatives; and highlight its benefits via extensive ablation studies.
Author(s)/Presenter(s):
Jinfan Yang, University of British Columbia, Canada
Chrystiano Araújo, University of British Columbia, Canada
Nicholas Vining, University of British Columbia, Google Inc., Canada
Zachary Ferguson, New York University, United States of America
Enrique Rosales, University of British Columbia, Universidad Panamericana, Canada
Daniele Panozzo, New York University, United States of America
Sylvain Lefebvre, French Institute for Research in Computer Science and Automation, France
Paolo Cignoni, Institute for Computer Science and Technologies - Italian National Research Council, Italy
Alla Sheffer, University of British Columbia, Canada
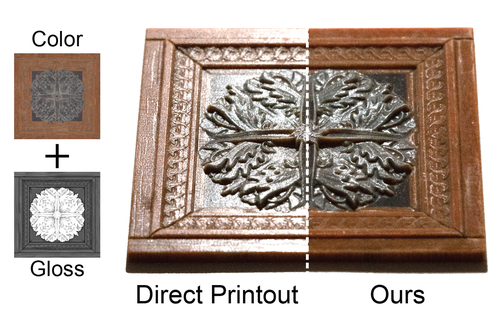
Abstract: 3D printing technology is a powerful tool for manufacturing complex shapes with high-quality textures. Gloss, next to color and shape, is one of the most salient visual aspects of an object. Unfortunately, printing a wide range of spatially-varying gloss properties using state-of-the-art 3D printers is challenging as it relies on a geometrical modifications to achieve the desired appearance. A common post-processing step is to apply off-the-shelf varnishes that modify the final gloss. The main difficulty in automating this process lies in the physical properties of the varnishes which owe their appearance to a high concentration of large particles and as such, they cannot be easily deposited with current 3D color printers. As a result, fine-grained control of gloss properties using today's 3D printing technologies is limited in terms of both spatial resolution and the range of achievable gloss. We address the above limitations and propose new printing hardware based on piezo-actuated needle valves capable of jetting highly viscous varnishes. Based on the new hardware setup, we present the complete pipeline for controlling the gloss of a given 2.5 D object, from printer calibration, through material selection, to the manufacturing of models with spatially-varying reflectance. Furthermore, we discuss the potential integration with current 3D printing technology. Apart from being a viable solution for 3D printing, our method offers an additional and essential benefit of separating color and gloss fabrication which makes the process more flexible and enables high-quality color and gloss reproduction.
Author(s)/Presenter(s):
Michal Piovarci, Universita della Svizzera italiana, Switzerland
Michael Foshey, Massachusetts Institute of Technology, United States of America
Vahid Babaei, Max-Planck-Institut für Informatik, Germany
Szymon Rusinkiewicz, Princeton University, United States of America
Wojciech Matusik, Massachusetts Institute of Technology, United States of America
Piotr Didyk, Universita della Svizzera italiana, Switzerland
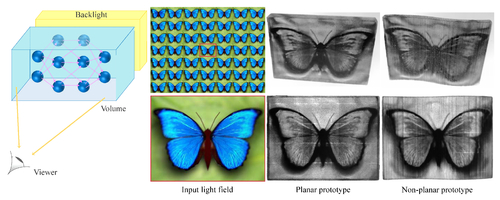
Abstract: Modern 3D printers are capable of printing large-size light-field displays at high-resolutions. However, optimizing such displays in full 3D volume for a given light-field imagery is still a challenging task. Existing light field displays optimize over relatively small resolutions using a few co-planar layers in a 2.5D fashion to keep the problem tractable. In this paper, we propose a novel end-to-end optimization approach that encodes input light field imagery as a continuous-space implicit representation in a neural network. This allows fabricating high-resolution, attenuation-based volumetric displays that exhibit the target light fields. In addition, we incorporate the physical constraints of the material to the optimization such that the result can be printed in practice. Our simulation experiments demonstrate that our approach brings significant visual quality improvement compared to the multi-layer and uniform grid-based approaches. We validate our simulations with fabricated prototypes and demonstrate that our pipeline is flexible enough to print both planar and non-planar displays.
Author(s)/Presenter(s):
Quan Zheng, Max-Planck-Institut für Informatik, Germany
Vahid Babaei, Max-Planck-Institut für Informatik, Germany
Gordon Wetzstein, Stanford University, United States of America
Hans-Peter Seidel, Max-Planck-Institut für Informatik, Germany
Matthias Zwicker, University of Maryland College Park, United States of America
Gurprit Singh, Max-Planck-Institut für Informatik, Germany