Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date/Time:
04 – 13 December 2020
All presentations are available in the virtual platform on-demand.
Lecturer(s):
Wenzheng Chen, University of Toronto, Canada
Fangyin Wei, Princeton University, United States of America
Kyros Kutulakos, University of Toronto, Canada
Szymon Rusinkiewicz, Princeton University, United States of America
Felix Heide, Princeton University, United States of America
Bio:
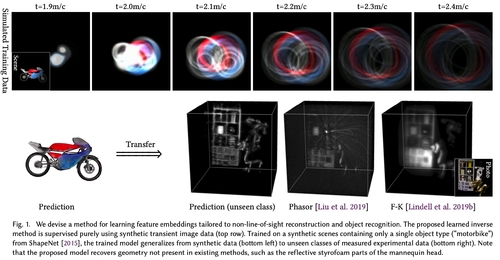
Description: Objects obscured by occluders are considered lost in the images acquired by conventional camera systems, prohibiting both visualization and understanding of such hidden objects. Non-line-of-sight methods (NLOS) aim at recovering information about hidden scenes, which could help make medical imaging less invasive, improve the safety of autonomous vehicles, and potentially enable capturing unprecedented high-definition RGB-D data sets that include geometry beyond the directly visible parts. Recent NLOS methods have demonstrated scene recovery from time-resolved pulse-illuminated measurements encoding occluded objects as faint indirect reflections. Unfortunately, these systems are fundamentally limited by the quartic intensity fall-off for diffuse scenes. With laser illumination limited by eye-safety limits, recovery algorithms must tackle this challenge by incorporating scene priors. However, existing NLOS reconstruction algorithms do not facilitate learning scene priors. Even if they did, datasets that allow for such supervision do not exist, and successful encoder-decoder networks and generative adversarial networks fail for real-world NLOS data. In this work, we close this gap by learning hidden scene feature representations tailored to both reconstruction and recognition tasks such as classification or object detection, while still relying on physical models at the feature level. We overcome the lack of real training data with a generalizable architecture that can be trained in simulation. We learn the differentiable scene representation jointly with the reconstruction task using a differentiable transient renderer in the objective, and demonstrate that it generalizes to unseen classes and unseen real-world scenes, unlike existing encoder-decoder architectures and generative adversarial networks. The proposed method allows for end-to-end training for different NLOS tasks, such as image reconstruction, classification, and object detection, while requiring an order of magnitude less memory than existing methods and running at real-time rates. We demonstrate hidden view synthesis, RGB-D reconstruction, classification, and object detection in the hidden scene in an end-to-end fashion.