Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date/Time:
04 – 13 December 2020
All presentations are available in the virtual platform on-demand.
Lecturer(s):
Hanqing Wang, Beijing Institute of Technology, China
Wei Liang, Beijing Institute of Technology, China
Lap-Fai Yu, George Mason University, United States of America
Bio:
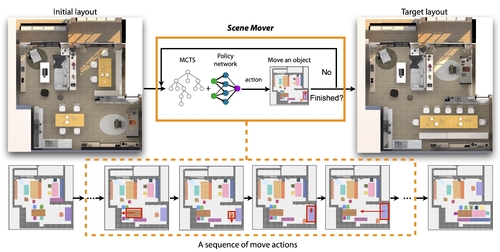
Description: We propose a novel approach for automatically generating a move plan for scene arrangement. Given a scene like an apartment with many furniture objects, to transform its layout into another layout, one would need to determine a collision-free move plan. It could be challenging to design this plan manually because the furniture objects may block the way of each other if not moved properly; and there is a large complex search space of move action sequences that grow exponentially with the number of objects. To tackle this challenge, we propose a learning-based approach to generate a move plan automatically. At the core of our approach is a Monte Carlo tree that encodes possible states of the layout, based on which a search is performed to move a furniture object appropriately in the current layout. We trained a policy neural network embedded with an LSTM module for estimating the best actions to take in the expansion step and simulation step of the Monte Carlo tree search process. Leveraging the power of deep reinforcement learning, the network learned how to make such estimations through millions of trials of moving objects. We demonstrated our approach for moving objects under different scenarios and constraints. We also evaluated our approach on synthetic and real-world layouts, comparing its performance with that of humans and other baseline approaches.