Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date/Time:
04 – 13 December 2020
All presentations are available in the virtual platform on-demand.
Lecturer(s):
Soshi Shimada, Max-Planck-Institut für Informatik, Saarland Informatics Campus, Germany
Vladislav Golyanik, Max-Planck-Institut für Informatik, Saarland Informatics Campus, Germany
Weipeng Xu, Facebook Reality Labs, United States of America
Christian Theobalt, Max-Planck-Institut für Informatik, Saarland Informatics Campus, Germany
Bio:
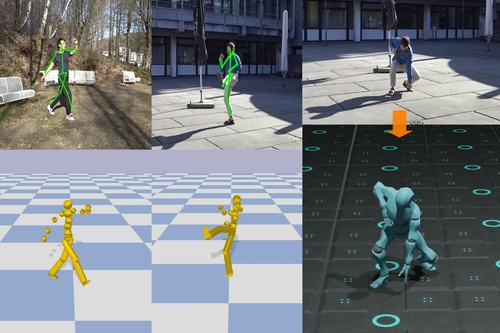
Description: Marker-less 3D human motion capture from a single colour camera has seen significant progress. However, it is a very challenging and severely ill-posed problem. In consequence, even the most accurate state-of-the-art approaches have significant limitations. Purely kinematic formulations on the basis of individual joints or skeletons, and the frequent frame-wise reconstruction in state-of-the-art methods greatly limit 3D accuracy and temporal stability compared to multi-view or marker-based motion capture. Further, captured 3D poses are often physically incorrect and biomechanically implausible, or exhibit implausible environment interactions (floor penetration, foot skating, unnatural body leaning and strong shifting in depth), which is problematic for any use case in computer graphics. We, therefore, present PhysCap, the first algorithm for physically plausible, real-time and marker-less human 3D motion capture with a single colour camera at 25 fps. Our algorithm first captures 3D human poses purely kinematically. To this end, a CNN infers 2D and 3D joint positions, and subsequently, an inverse kinematics step finds space-time coherent joint angles and global 3D pose. Next, these kinematic reconstructions are used as constraints in a real-time physics-based pose optimiser that accounts for environment constraints (e.g., collision handling and floor placement), gravity, and biophysical plausibility of human postures. Our approach employs a combination of ground reaction force and residual force for plausible root control, and uses a trained neural network to detect foot contact events in images. Our method captures physically plausible and temporally stable global 3D human motion, without physically implausible postures, floor penetrations or foot skating, from video in real time and in general scenes. PhysCap achieves state-of-the-art accuracy on established pose benchmarks, and we propose new metrics to demonstrate the improved physical plausibility and temporal stability.