Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date/Time:
04 – 13 December 2020
All presentations are available in the virtual platform on-demand.
Lecturer(s):
Yunbo Zhang, Georgia Institute of Technology, United States of America
Wenhao Yu, Georgia Institute of Technology, United States of America
C. Karen Liu, Stanford University, United States of America
Charles C. Kemp, Georgia Institute of Technology, United States of America
Greg Turk, Georgia Institute of Technology, United States of America
Bio:
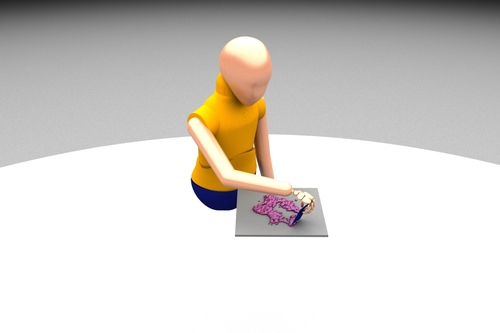
Description: We present a method of training character manipulation of amorphous materials such as those often used in cooking. Common examples of amorphous materials include granular materials (salt, uncooked rice), fluids (honey), and visco-plastic materials (sticky rice, softened butter). A typical task is to spread a given material out across a flat surface using a tool such as a scraper or knife. We use reinforcement learning to train our controllers to manipulate materials in various ways. The training is performed in a physics simulator that uses position-based dynamics of particles to simulate the materials to be manipulated. The neural network control policy is given observations of the material (e.g. a low-resolution density map), and the policy outputs actions such as rotating and translating the knife. We demonstrate policies that have been successfully trained to carry out the following tasks: spreading, gathering, and flipping. We produce a final animation by using inverse kinematics to guide a character’s arm and hand to match the motion of the manipulation tool such as a knife or a frying pan.