Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
Pre-recorded Sessions: From 4 December 2020 | Live Sessions: 10 – 13 December 2020
4 – 13 December 2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020
#SIGGRAPHAsia | #SIGGRAPHAsia2020





Date/Time:
04 – 13 December 2020
All presentations are available in the virtual platform on-demand.
Lecturer(s):
Xiaohui Zhou, Shenzhen University, China
Ke Xie, Shenzhen University, China
Kai Huang, Shenzhen University, China
Yilin Liu, Shenzhen University, China
Yang Zhou, Shenzhen University, China
Minglun Gong, University of Guelph, Canada
Hui Huang, Shenzhen University, China
Bio:
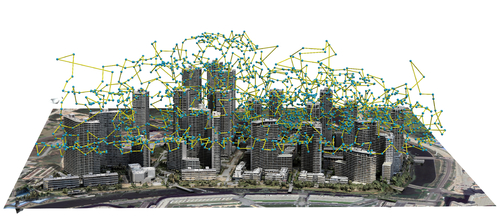
Description: With rapid development in UAV technologies, it is now possible to reconstruct large-scale outdoor scenes using only images captured by low-cost drones. The problem, however, becomes how to plan the aerial path for a drone to capture images so that two conflicting goals are optimized: maximizing the reconstruction quality and minimizing mid-air image acquisition effort. Existing approaches either resort to pre-defined dense and thus inefficient view sampling strategy, or plan the path adaptively but require two onsite flight passes and intensive computation in-between. Hence, using these methods to capture and reconstruct large-scale scenes can be tedious. In this paper, we present an adaptive aerial path planning algorithm that can be done before the site visit. Using only a 2D map and a satellite image of the to-be-reconstructed area, we first compute a coarse 2.5D model for the scene based on the relationship between buildings and their shadows. A novel Max-Min optimization is then proposed to select a minimal set of viewpoints that maximizes the reconstructability under the the same number of viewpoints. Experimental results on benchmark show that our planning approach can effectively reduces the number of viewpoints needed than the previous state-of-the-art method, while maintaining the comparable reconstruction quality. Since no field computation or a second visit is needed, and the view number is also minimized, our approach significantly saves the time required in the field as well as the off-line computation cost for multi-view stereo reconstruction, making it very possible to reconstruct a large-scale urban scene in a short time with bearable effort.